
重点研究分野
ロボットの遠隔操作とスマートメカニズム
私たちは,遠隔操作型の高精度マニピュレータ,直感的な腹腔鏡用ツールチェンジャー,没入型の仮想現実シミュレーターを通じて,低侵襲手術(ミニマルインベイシブサージェリー)の技術を前進させています.
加えて,省エネルギーで小型なリニアモーター,高精度ギアボックス,折りたたみ可能な連続体アクチュエーターを開発しており,これらは洗練されたモデルベース設計ツールと制御用エレクトロニクスによって支えられています.これらの技術革新は,手術の精度向上,患者の回復期間の短縮,高度な手術トレーニングの普及,そして要求の高い用途における高速・高精度なロボティクスの実現を目指しています.
加えて,省エネルギーで小型なリニアモーター,高精度ギアボックス,折りたたみ可能な連続体アクチュエーターを開発しており,これらは洗練されたモデルベース設計ツールと制御用エレクトロニクスによって支えられています.これらの技術革新は,手術の精度向上,患者の回復期間の短縮,高度な手術トレーニングの普及,そして要求の高い用途における高速・高精度なロボティクスの実現を目指しています.
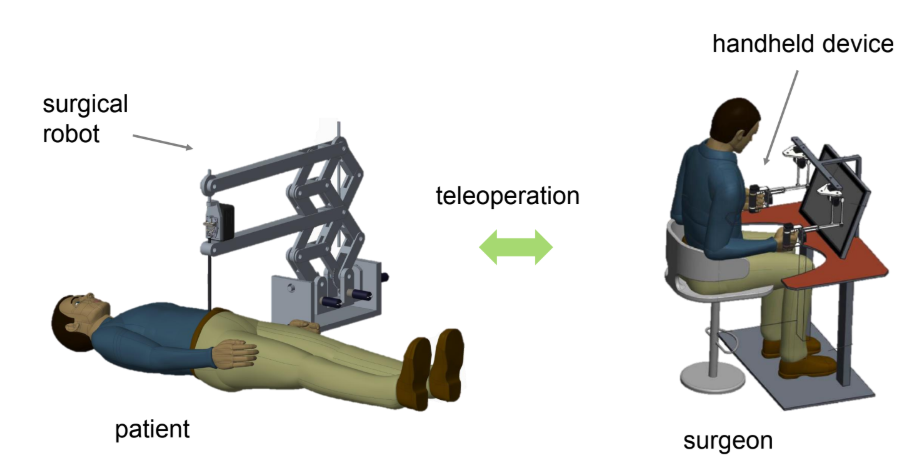
手術用ロボット
ロボットの遠隔操作とスマートメカニズム
私たちは,遠隔操作型の高精度マニピュレータ,直感的な腹腔鏡用ツールチェンジャー,没入型の仮想現実シミュレーターを通じて,低侵襲手術(ミニマルインベイシブサージェリー)の技術を前進させています.
加えて,省エネルギーで小型なリニアモーター,高精度ギアボックス,折りたたみ可能な連続体アクチュエーターを開発しており,これらは洗練されたモデルベース設計ツールと制御用エレクトロニクスによって支えられています.これらの技術革新は,手術の精度向上,患者の回復期間の短縮,高度な手術トレーニングの普及,そして要求の高い用途における高速・高精度なロボティクスの実現を目指しています.
加えて,省エネルギーで小型なリニアモーター,高精度ギアボックス,折りたたみ可能な連続体アクチュエーターを開発しており,これらは洗練されたモデルベース設計ツールと制御用エレクトロニクスによって支えられています.これらの技術革新は,手術の精度向上,患者の回復期間の短縮,高度な手術トレーニングの普及,そして要求の高い用途における高速・高精度なロボティクスの実現を目指しています.
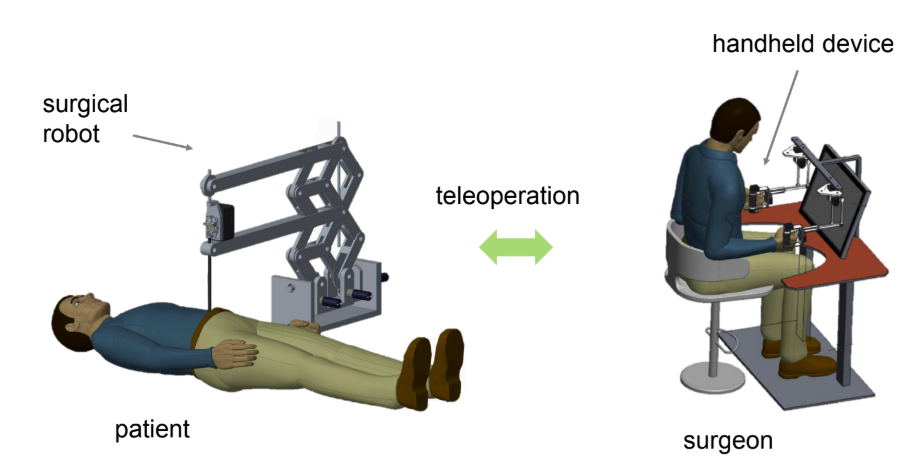
手術用ロボット
ウェアラブル・キネスティックハプティクス(運動感覚型触覚技術)
私たちは,感覚知覚を高め,運動学習を加速させ,リハビリテーションを支援するために,マルチディレクショナル(多方向)な力覚フィードバックグローブ,振動触覚インターフェース,軽量な外骨格型デバイスといったウェアラブルなハプティクスデバイスを設計しています.
これらのシステムは,ユーザーにとって直感的なフィードバックを提供し,操作性とインタラクション能力の向上を実現します.
これらのシステムは,ユーザーにとって直感的なフィードバックを提供し,操作性とインタラクション能力の向上を実現します.
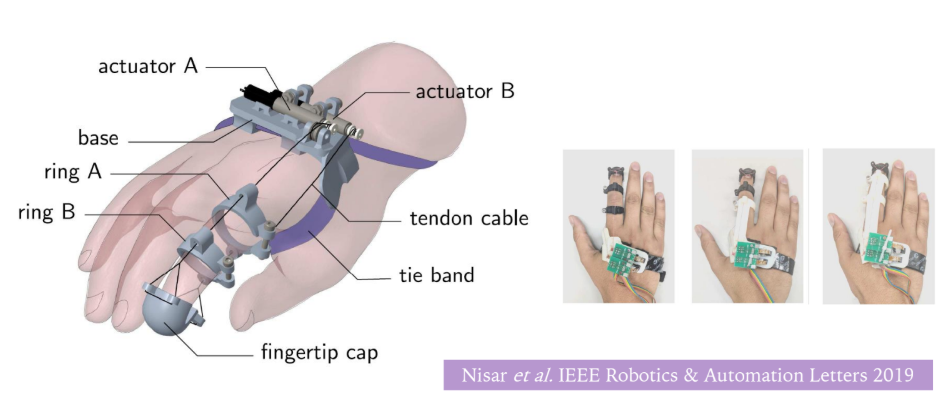
触覚技術とウェアラブル外骨格
ウェアラブル・キネスティックハプティクス(運動感覚型触覚技術)
私たちは,感覚知覚を高め,運動学習を加速させ,リハビリテーションを支援するために,マルチディレクショナル(多方向)な力覚フィードバックグローブ,振動触覚インターフェース,軽量な外骨格型デバイスといったウェアラブルなハプティクスデバイスを設計しています.
これらのシステムは,ユーザーにとって直感的なフィードバックを提供し,操作性とインタラクション能力の向上を実現します.
これらのシステムは,ユーザーにとって直感的なフィードバックを提供し,操作性とインタラクション能力の向上を実現します.
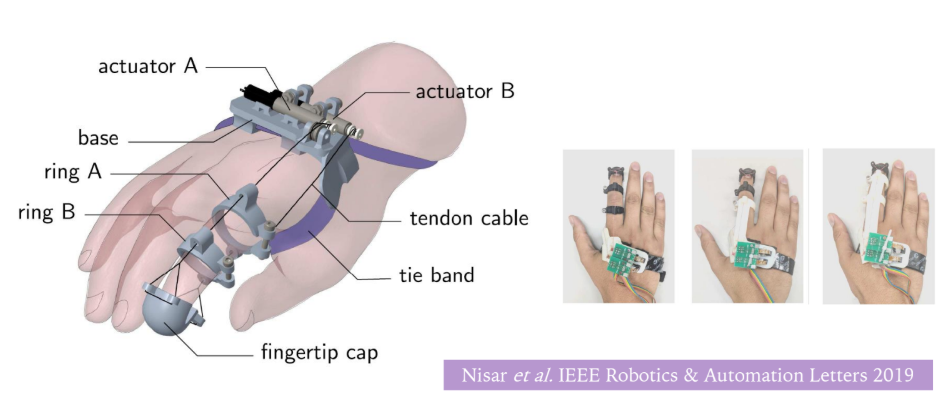
触覚技術とウェアラブル外骨格
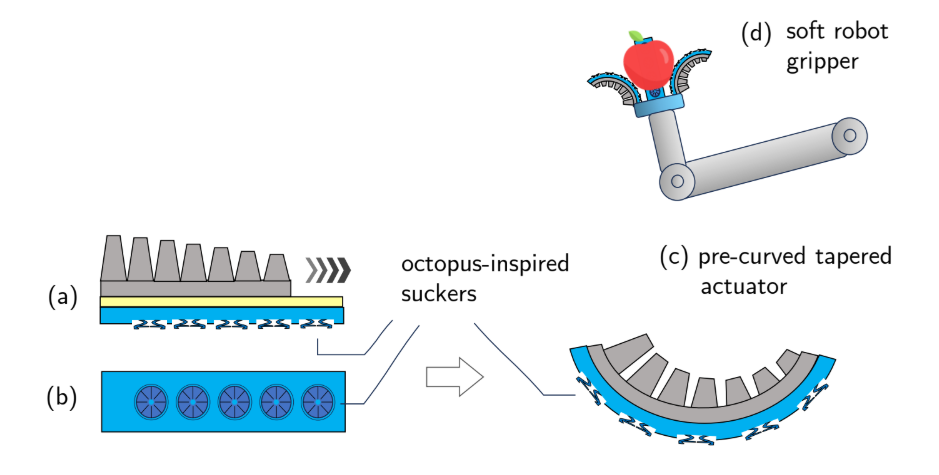
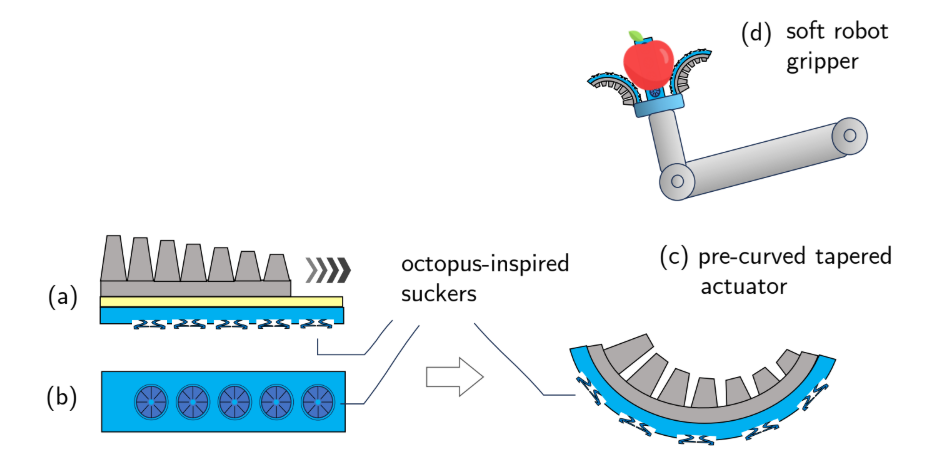
ソフトロボティクスと適応型把持技術
ソフトロボティクスの分野では,柔軟かつ適応性のあるアクチュエーターとグリッパーを開発し,壊れやすい物体や不規則な形状のものを安全に取り扱う技術に注力しています.
空気圧駆動や腱駆動アクチュエーター,さらに機械学習アルゴリズムを活用することで,医療,産業,家庭など多様な環境下での堅牢な把持作業を可能にするロボットシステムを構築しています.
空気圧駆動や腱駆動アクチュエーター,さらに機械学習アルゴリズムを活用することで,医療,産業,家庭など多様な環境下での堅牢な把持作業を可能にするロボットシステムを構築しています.
適応型把持技術
ソフトロボティクスと適応型把持技術
ソフトロボティクスの分野では,柔軟かつ適応性のあるアクチュエーターとグリッパーを開発し,壊れやすい物体や不規則な形状のものを安全に取り扱う技術に注力しています.
空気圧駆動や腱駆動アクチュエーター,さらに機械学習アルゴリズムを活用することで,医療,産業,家庭など多様な環境下での堅牢な把持作業を可能にするロボットシステムを構築しています.
空気圧駆動や腱駆動アクチュエーター,さらに機械学習アルゴリズムを活用することで,医療,産業,家庭など多様な環境下での堅牢な把持作業を可能にするロボットシステムを構築しています.
適応型把持技術
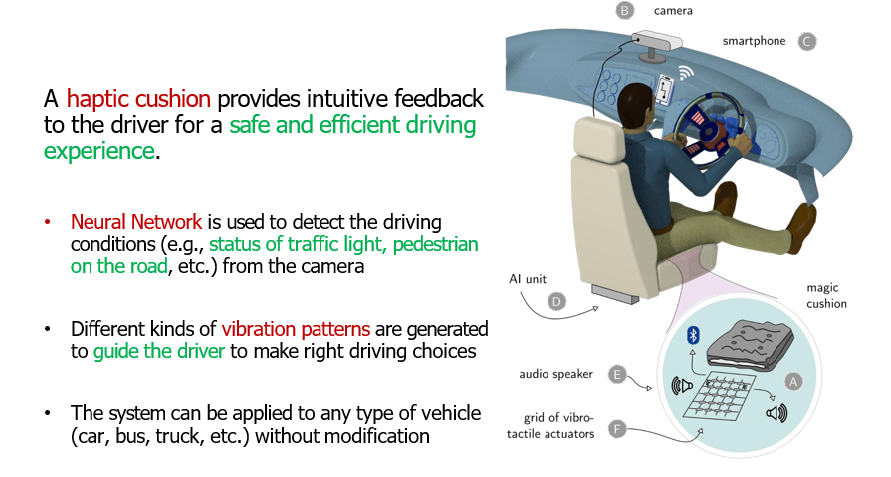
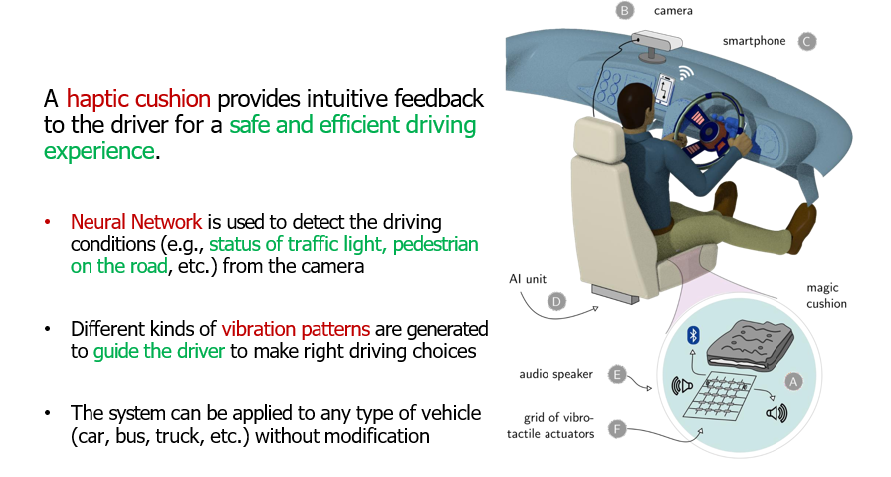
AI活用による人間支援・移動支援
私たちは人工知能を駆使して,コンテキスト(状況)を理解できるロボティクスシステムを開発し,人間の移動性と安全性の向上を目指しています.
具体的には,座席に内蔵されたハプティックガイダンスシステム,深層学習に基づく自律ナビゲーション用の知覚モジュール,歩行を認識して適応する義足・外骨格用システムなどがあり,ユーザーの生活の質の向上に貢献しています.
具体的には,座席に内蔵されたハプティックガイダンスシステム,深層学習に基づく自律ナビゲーション用の知覚モジュール,歩行を認識して適応する義足・外骨格用システムなどがあり,ユーザーの生活の質の向上に貢献しています.
AI活用による人間支援
AI活用による人間支援・移動支援
私たちは人工知能を駆使して,コンテキスト(状況)を理解できるロボティクスシステムを開発し,人間の移動性と安全性の向上を目指しています.
具体的には,座席に内蔵されたハプティックガイダンスシステム,深層学習に基づく自律ナビゲーション用の知覚モジュール,歩行を認識して適応する義足・外骨格用システムなどがあり,ユーザーの生活の質の向上に貢献しています.
具体的には,座席に内蔵されたハプティックガイダンスシステム,深層学習に基づく自律ナビゲーション用の知覚モジュール,歩行を認識して適応する義足・外骨格用システムなどがあり,ユーザーの生活の質の向上に貢献しています.
AI活用による人間支援